No siempre los fabricantes de convertidores de frecuencia ofrecen un medio de estimar que par puede lograrse con sus equipos. Para tratar de esclarecer este tema se ha ensayado con un dinamo-péndulo a un CFW10 (en modo escalar) con un motor de 1.5HP 2 polos. El banco de ensayos es el provisto al ISFT 188 de Gral. Rodriguez, que en esta imagen se ve con un motor monofásico:

Principio de funcionamiento:
El dinamo está montado sobre soportes de pie con rodamientos, en lugar de sobre sus patas, de forma que su carcasa puede moverse libremente. Sobre la misma se encuentran montados dos brazos de acero con pesas de 10N que pueden deslizarse como en una báscula. Cuando se aplica carga al dínamo este reacciona. Equilibrando el par de fuerzas de reacción con los contrapesos, se puede determinar la fuerza de reacción y con ella el par motor desarrollado. Lograr el equilibrio es complicado, el movimiento de la barra es de tipo pendular como se observa en el video:
A medida que se acerca al equilibrio la frecuencia de la oscilación se hace mas baja, permitiendo encontrar una medida de la pesa que se inclina mas hacia la derecha y otra posición que se inclina mas a la izquierda. Con un poco de pericia en su uso, estas dos medidas pueden diferir entre si en un par de mm. Tomando el promedio de ambas mediciones se obtiene la posición de equilibrio. En primer lugar se busca equilibrio sin girar. Esto se trata de determinar con las pesas a 50cm del extremo del soporte. Luego con el motor girando a diferentes cargas del dínamo. La diferencia entre las posiciones de equilibrio se multiplica por el peso de la pesa y se obtiene el par desarrollado.
Junto con estas mediciones se toman las RPM del eje,

también se mide la corriente del motor y se grafican los resultados a diferentes frecuencias de trabajo.
Ensayo:
El convertidor ensayado es un WEG, CFW10 de 7.3A con alimentación monofásica. El motor es un WEG de 1.5HP 2800RPM, 50Hz conectado en triángulo, con una corriente nominal de 4.55A. El par nominal de este motor es de 3.75Nm.
El gráfico de par motor (eje vertical en Nm) en función de la velocidad del eje (eje horizontal en RPM), para diferentes frecuencias de trabajo es el siguiente:

En este gráfico se ven varias características del modo de control escalar:
1) la velocidad no es constante, depende de la carga. La frecuencia indicada en el display del HMI, solo permite estimar la velocidad real del motor cuando este está en vacío. Con carga, debido al resbalamiento característico del motor asincrónico y como además el convertidor en escalar no corrige frecuencia al aumentar la corriente, se ve una caída en las RPM al aumentar la carga mecánica.
1) la velocidad no es constante, depende de la carga. La frecuencia indicada en el display del HMI, solo permite estimar la velocidad real del motor cuando este está en vacío. Con carga, debido al resbalamiento característico del motor asincrónico y como además el convertidor en escalar no corrige frecuencia al aumentar la corriente, se ve una caída en las RPM al aumentar la carga mecánica.
2) en frecuencias bajas el par máximo obtenido es muy inferior al nominal (3.75Nm)
3) en sobrevelocidad (frecuencias superiores a la nominal) el par máximo vuelve a reducirse.
3) incluso a 50Hz, no se obtiene el par nominal del motor.
En este gráfico no se indican los valores de corriente, por lo que podría parecer que se puede exigir un poco mas al motor. No es así... En el siguiente gráfico se marcan los valores de par obtenidos a la corriente nominal del motor, antes de que el convertidor saliera de servicio por error de sobrecarga (E05):
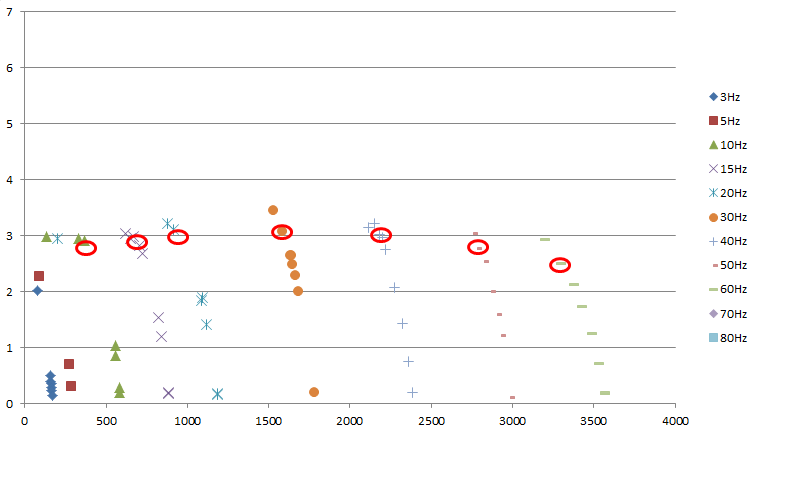
Se observa muy claramente que no puede llegarse al valor de par nominal en ninguna de las frecuencias ensayadas, llegando como máximo a un 80 % del mismo. Este problema es característico del control escalar.
Además se debe aclarar que en estas mediciones no se ha tomado en cuenta el efecto del calentamiento debido a armónicas ni a la falta de refrigeración del motor en bajas revoluciones, dado que por la corta duración de los ensayos, estos no resultaban de importancia. En una aplicación real deberá reducirse el par de régimen permanente para tomar en cuenta dicho calentamiento.
Además se debe aclarar que en estas mediciones no se ha tomado en cuenta el efecto del calentamiento debido a armónicas ni a la falta de refrigeración del motor en bajas revoluciones, dado que por la corta duración de los ensayos, estos no resultaban de importancia. En una aplicación real deberá reducirse el par de régimen permanente para tomar en cuenta dicho calentamiento.